-
Title
-
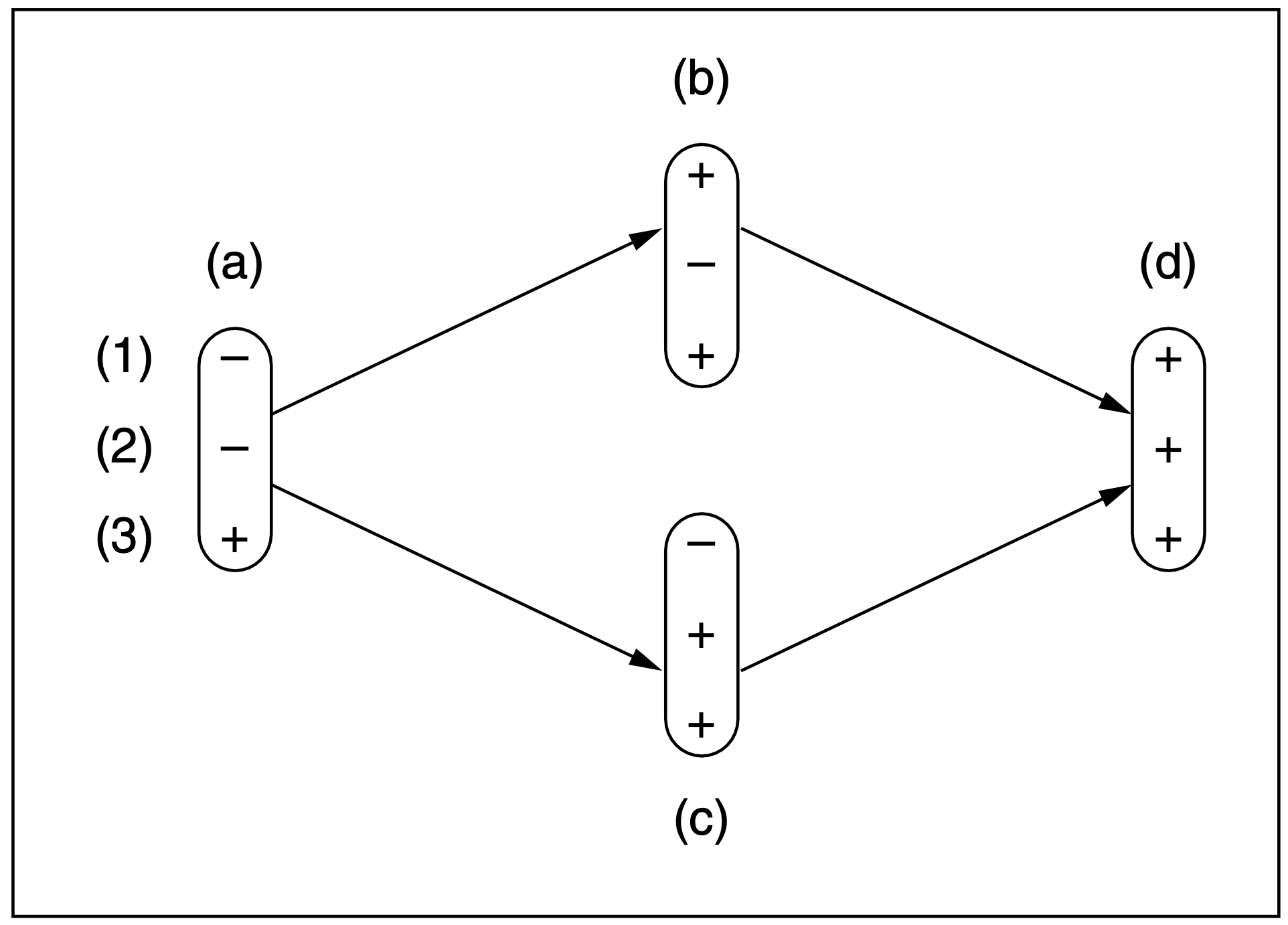
Routes of Transition from Hand Tool to Automaton
-
Description
-
The diagram is constructed from three binary oppositions, between (1) human (–) and non-human (+) power; (2) skilled (–) and mechanical (+) constraint; and (3) somatic (–) and extra-somatic (+) working points. With the hand tool (a), the working point is a detached instrument, but the hand that holds it not only delivers a bodily power but also guides the motion of the tool. With the automaton (d), these human functions have been entirely supplanted by the apparatus. Of the two intermediate cases, (b) and (c), the first comprises what are often called ‘machine tools’, which, though driven from an external power-source, still call for skilled manipulation by an operator. An example is the power-drill. But in the second case, of ‘man-powered machines’, the opposite situation obtains, for the constraint is mechanical, while human beings merely supply the motive power, for example by working a treadle, turning a crank, or operating a pump-handle. The line of distinction between manpower and skilled constraint thus places (c) on the side of the machine, but leaves (b) on the side of the tool.
-
Designer
-
Ingold, Tim
-
Date
-
2000
-
Source
-
The perception of the environment: Essays on livelihood, dwelling and skill.
-
Bibliographic Citation
-
Ingold, Tim. (2000). The perception of the environment: Essays on livelihood, dwelling and skill. Routledge.
-
is composed of
-
English
Rhombus
-
has attribute
-
English
Arrow
-
English
Solid Line
-
use feature
-
English
Brace
-
English
Minus
-
English
Plus